Student(s): Oskar Person, Yanik Dreiling, Justus Schwann, Ullaskrishnan Poikavila;
Supervisor(s): Dr. Pietro Bonizzi, Dr. Joel Karel, Matthijs Cluitmans;
Semester: 2015-2016;
Problem statement and motivation:
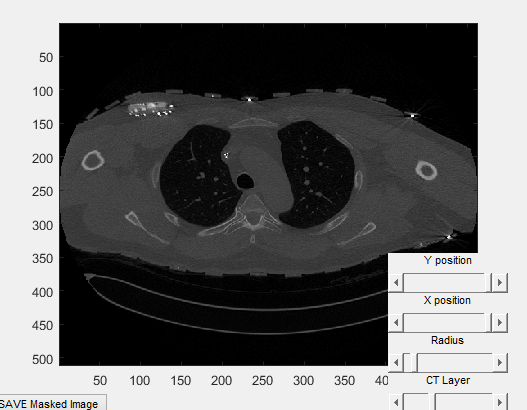
Cardiovascular diseases (CVD), or irregularities in heart and related blood vessels, have led to nearly 17.5 million deaths in 2011 alone, and this number is increasing at a steady rate. This makes CVD the leading cause of deaths worldwide. A majority of these deaths could have been prevented by earlier detection of symptoms. Electrocardiogram Imaging (ECGI) is a technique that helps in quickly detecting the cardiac irregularities and expediting the diagnoses. Electrodes are placed on the torso to record cardiac electrical activity. But the skin and body mass in between the heart and torso dampens these currents leading to an incorrect visualization of cardiac motion. The reverse problem of ECGI tries to reconstruct the true cardiac electric activity using the observed currents on torso electrodes and geometric knowledge of the surfaces of heart and torso. Currently, the reconstruction of heart surface and segmentation of electrodes from the torso surface are done manually. This makes it both time and energy consuming and goes against the whole purpose of ECGI quickening cardiac diagnosis. The aim of this project was to automate the process of reconstructing heart and torso surfaces. CT Scans are taken of the patient with the electrodes on, and they represent the input to the automated segmentation and generation of torso and heart surface. The implemented algorithms try to segment out the electrode strips to help reconstruct the torso surface and also detects the edges to help visualize the heart surface. A GUI is also provided to help the user in running the algorithms. The group achieved successful automated segmentation of the body surface electrode strips, generation of a preliminary torso surface, and preliminary segmentation of the heart surface. Future work will be focused on making the torso model more realistic, improving segmentation of the heart surface, and generating the heart model.
Research questions/hypotheses:
The aim of this project was to automate the process of reconstructing heart and torso surfaces. CT Scans are taken of the patient with the electrodes on, and they represent the input to the automated segmentation and generation of torso and heart surface.
Main outcomes:
The implemented algorithms try to segment out the electrode strips to help reconstruct the torso surface and also detects the edges to help visualize the heart surface. A GUI is also provided to help the user in running the algorithms.