Student(s): Joeri Hermans, Max Uppenkamp, Benjamin Hahn, Lando Kroes, Karsten Seelert;
Supervisor(s): Dr. Rico Möckel;
Semester: 2015-2016;

Problem statement and motivation:
After earthquakes usually it is not safe to enter damaged buildings to search for people inside. As a result it would be desirable if part of this search could be performed by robots that can autonomously search for people in such areas that are difficult to access by humans. One of the many challenges in such an application is that these robots have to autonomously navigate in partially destroyed areas. The goal which we aim for is to create a quadcopter capable of moving in such an environment. To achieve this goal, we analysed the requirements for a quadcopter in a search & rescue operation. Also we researched algorithms that allow quadcopters autonomous mapping of unknown environments and to estimate their own position – a problem well-known as Simultaneous Localization and Mapping (SLAM).
Research questions/hypotheses:
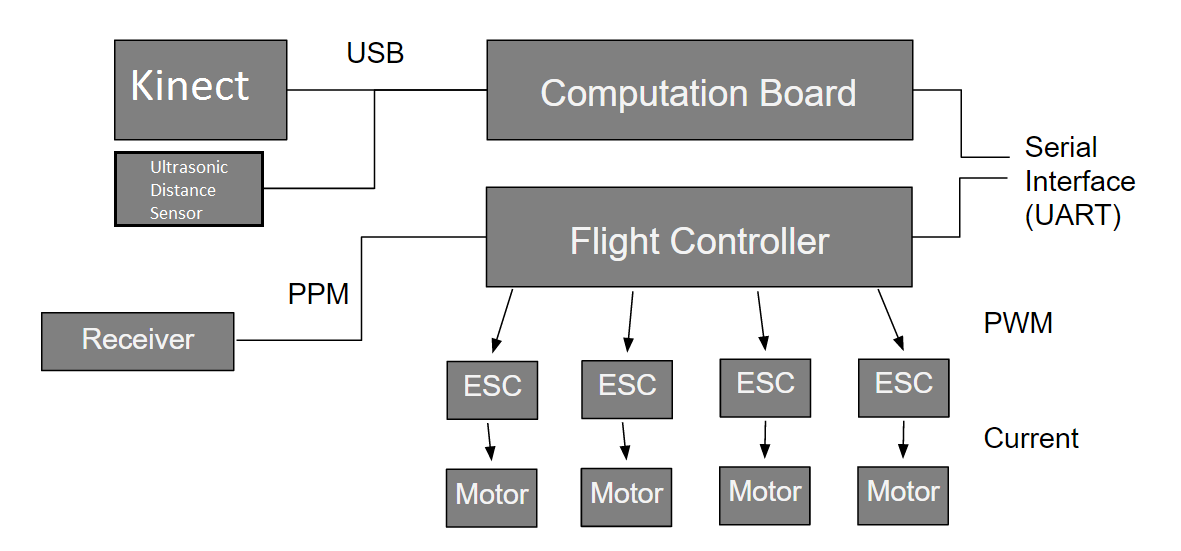
- How to setup a single quadcopter for search and rescue operations?
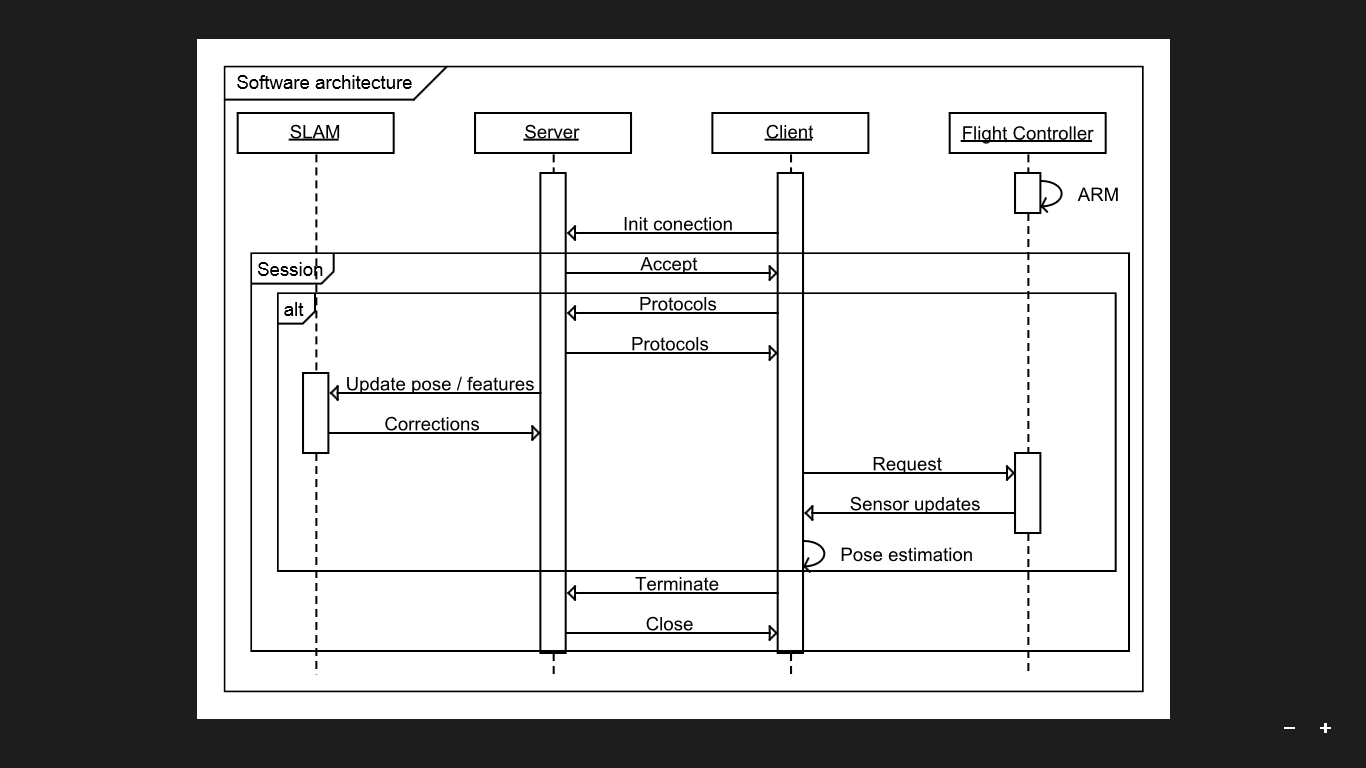
- How to setup the software architecture for search and rescue operations?
- What kind of pathfinding can be used in a 3D environment?
Main outcomes:
- We designed and implemented architectures for control software and quadcopter electonics.
- We constructed and built a quadcopter based on off-the-shelf components.