Student(s): Jeroen Boonen, Mara Houbraken, Oliver Lehmacher, Jonas Robers, Guy Theunissen;
Supervisor(s): Dr. Nico Roos;
Semester: 2015-2016;
Problem statement and motivation:
The RoboCup Soccer League is an international initiative that aims to promote the fields of Robotics and Artificial Intelligence and to improve already existing technologies. Its official goal consists of achieving a soccer team of fully autonomous humanoid robot players that is able to win a game against the winner of the most recent World Cup by 2050, while complying with the official FIFA-rules. Currently the RoboCup is divided into several competition domains, one of which is the Standard Platform League in which all teams use identical robots and focus on proper software development rather than robot mechanics. The robots used in this League are NAOs, humanoid robots developed by Aldebaran Robotics (Kitano, Asada, Kuniyoshi, Noda, & Osawa, 1997)
This research project focuses its research around the following problem statement:
Find and research a new software platform that can be used with the NAO robots in the Standard Platform League.
Research questions/hypotheses:
In the present project we aimed at answering the following research questions:
- What is the most appropriate platform for this application?
- What is needed additionally for this platform to work with the NAO Robots?
Main outcomes:
-
A decision was made to use ROS (Robot Operating System) as a framework around the development of a new soccer platform.
-
Currently, a ROS distribution is running on of the NAO robots, specifically an adapted version of ROS Indigo, tailored for the use on a NAO robot (ROS, 2016). A ROS master can be started on the NAO robot and the provided nodes and topics can be accessed.
-
In both approaches, problems have been encountered with the dataset which is extremely unbalanced. Therefore, most instances will be classified with the most frequent label. Thus, balancing of the data is necessary. Results obtained are better with a reduced balanced dataset (using fewer than all 19 classes and making sure the number of instances per class are equal), increasing the performance while decreasing the number of labels. Moreover, the high variation of types of images within a class and the variation of quality of the pictures makes classification challenging.
-
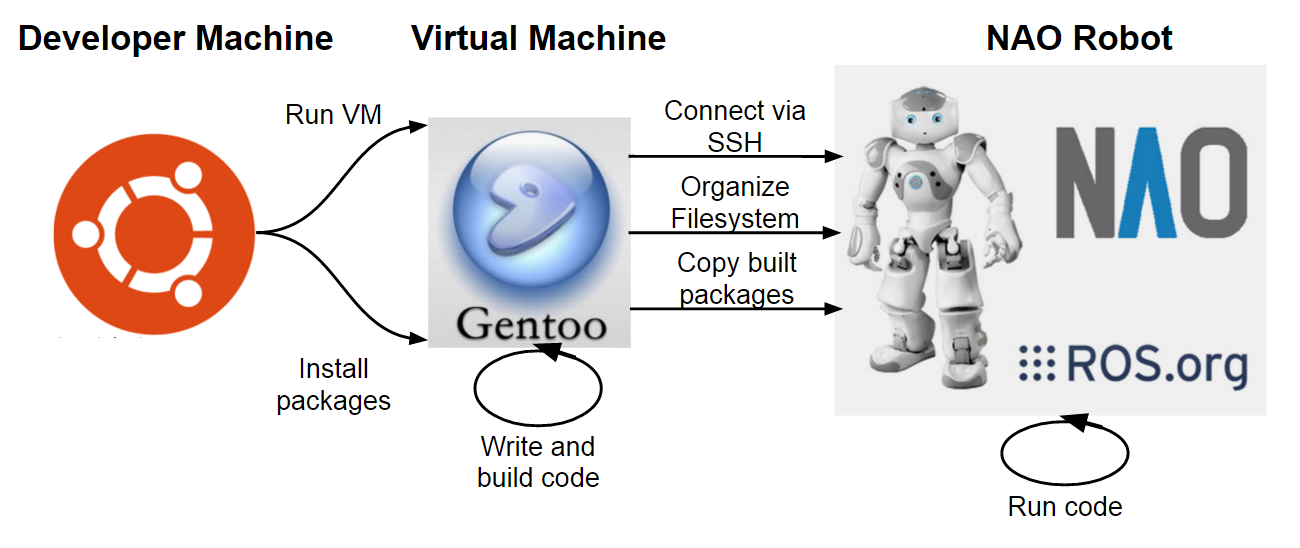
A development environment has been set up to allow development and compilation of C++ or Python code. It makes use of a virtual machine with NAOqi installed, so the installation of the development environment onto the virtual machine is practically the same for the installation on the NAO robot.
-
Custom nodes can be run
References:
Kitano, H., Asada, M., Kuniyoshi, Y., Noda, I., & Osawa, E. (1997). Robocup: the robot world cup initiative. Proceedings of the first international conference on Autonomous agents, 340-347.
ROS. (2016, 01-15). Aldeberan NAO package summary. Retrieved from http://wiki.ros.org/nao